Science Fiction
Dictionary
A B C D E F G H I J K L M N O P Q R S T U V W X Y Z
 |
Cheetah Cub Robot From PKD's Android Dreams

This is the stuff of Philip K. Dick's dreams - or at least those of the androids in his 1968 novel Do Androids Dream of Electric Sheep?.
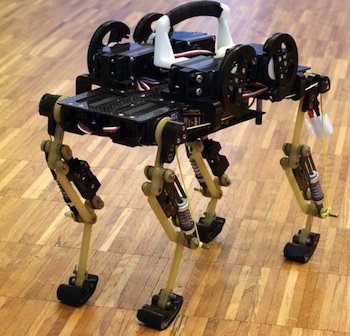
(A small robotic cat)
Even though it doesnt have a head, you can still tell what kind of animal it is: the robot is definitely modeled upon a cat. Developed by EPFLs Biorobotics Laboratory (Biorob), the cheetah-cub robot, a small-size quadruped prototype robot, is described in an article appearing today in the International Journal of Robotics Research. The purpose of the platform is to encourage research in biomechanics; its particularity is the design of its legs, which make it very fast and stable. Robots developed from this concept could eventually be used in search and rescue missions or for exploration.This robot is the fastest in its category, namely in normalized speed for small quadruped robots under 30Kg. During tests, it demonstrated its ability to run nearly seven times its body length in one second. Although not as agile as a real cat, it still has excellent auto-stabilization characteristics when running at full speed or over a course that included disturbances such as small steps. In addition, the robot is extremely light, compact, and robust and can be easily assembled from materials that are inexpensive and readily available.
(Robotic 'Cheetah cub' video)
As Isidore says in Philip K. Dick's 1968 classic Do Androids Dream of Electric Sheep:
""What about an exact electric duplicate of your cat? We can have a superb handcrafted job by Wheelright & Carpenter in which every detail of the old animal is faithfully repeated..."
Via PopSci.
Scroll down for more stories in the same category. (Story submitted 6/16/2013)
Follow this kind of news @Technovelgy.| Email | RSS | Blog It | Stumble | del.icio.us | Digg | Reddit |
Would
you like to contribute a story tip?
It's easy:
Get the URL of the story, and the related sf author, and add
it here.
Comment/Join discussion ( 0 )
Related News Stories - (" Robotics ")
Satyress Centaur Robot Horror Reminds Everyone Of Something
'Fess was very dutiful' - Christopher Stasheff, 1969.
Pole-Dancing Stripperbot Robot
'Why, a clockwork dancer, or, better still, one that would go by electricity and never run down...' - Jerome K. Jerome, 1893.
VaMEx Biomimetic Mars Robot Inspired By Skink
'Across the ground something small and metallic came, flashing in the dull sunlight of midday.' - Philip K. Dick, 1953.
DIY Robotic Content Farming
'The chief wheeled to the master machine and pressed a button.' - Schachner and Zagat, 1931.
Technovelgy (that's tech-novel-gee!) is devoted to the creative science inventions and ideas of sf authors. Look for the Invention Category that interests you, the Glossary, the Invention Timeline, or see what's New.
Science Fiction
Timeline
1600-1899
1900-1939
1940's 1950's
1960's 1970's
1980's 1990's
2000's 2010's
Current News
Satyress Centaur Robot Horror Reminds Everyone Of Something
'Fess was very dutiful'
When Colds Threaten You Can't Do This - Or Can You?
'...a hemispherical force field enclosing his head.'
Beautiful Visualization of Dawn Spacecraft
'Then he became aware of a gentle pressure pushing him away from the ship.'
Biological War: A Scenario
'And now they wre busily transforming all their companions, and so on, and so on...'
Pole-Dancing Stripperbot Robot
'Why, a clockwork dancer, or, better still, one that would go by electricity and never run down...'
Collective Superintelligence Is At Hand!
'Maybe the individual intelligence of each Cubic pools into a group intelligence...'
Instant Journalists: Ordinary People With Cell Phones
'We'll show them whose planet this is!'
Health Kiosk Has No Human Doctor
'The electronic body analyzer had been developed...'
Meta's Horizon Studio's Unique Avatars From Text Prompts
'Looks like she has bought the Avatar Construction Set and put together her own...'
VaMEx Biomimetic Mars Robot Inspired By Skink
'Across the ground something small and metallic came, flashing in the dull sunlight of midday.'
NEO Brain Computer Interface (BCI)
'The remains of the lace took on the rough shape of a brain...'
Did Frank Herbert Predict Bistable Displays Like E-Ink?
'A broken circle with arrows pointing to a right-hand flow appeared in the chalf.'
Monolith One Giant Industrial Metal 3D-printer
'The object seemed melted together like wax nothing was distinguishable.'
'Mooncrete' Lunar Regolith Concrete (LRC)
'And here they began to build...'
China's 'Magpie Drone' Ornithopter
'Midges have many capabilities. To the untrained eye, they look like sparrows.'
MAI-Voice-2 Microsoft Text-To-Speech
'I made disks of my own voice to the number of five hundred very carefully chosen words.'