Science Fiction
Dictionary
A B C D E F G H I J K L M N O P Q R S T U V W X Y Z
 |
SLAM from CSAIL Lets Robots Explore Autonomously

SLAM (Simultaneous Localization and Mapping) is a new system under development by the folks at CSAIL (Computer Science and Artificial Intelligence Laboratory, at MIT). The idea is to allow robots to navigate through varied environments without input from humans; SLAM lets the robots build and continuously update a three-dimensional map of their surroundings.
The SLAM system has been implemented in a Willow Garage PR2 robot using Microsoft's Kinnect. PR2 is an impressive research robot; read more about it in these stories:
But MIT's CSAIL researchers are not just doing this for robots; they hope that blind humans may one day be able to make use of a similar system to explore more confidently.
Amazing video shows robot mapping its environment supported by Google's cloud services.
PR2 robot shows the future of robotic helpers in this laundry-folding video.
Earlier experiment in which a robot roams an office alone.
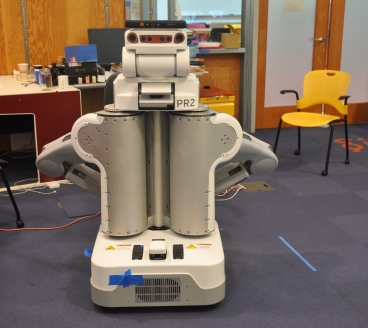
(PR2 using SLAM at CSAIL)
To explore unknown environments, robots need to be able to map them as they move around estimating the distance between themselves and nearby walls, for example and to plan a route around any obstacles, says Maurice Fallon, a research scientist at CSAIL who is developing these systems alongside John J. Leonard, professor of mechanical and ocean engineering, and graduate student Hordur Johannsson.But while a large amount of research has been devoted to developing one-off maps that robots can use to navigate around an area, these systems cannot adjust to changes in the surroundings over time, Fallon says: If you see objects that were not there previously, it is difficult for a robot to incorporate that into its map.
The new approach, based on a technique called Simultaneous Localization and Mapping (SLAM), will allow robots to constantly update a map as they learn new information over time, he says. The team has previously tested the approach on robots equipped with expensive laser-scanners, but in a paper to be presented this May at the International Conference on Robotics and Automation in St. Paul, Minn., they have now shown how a robot can locate itself in such a map with just a low-cost Kinect-like camera.
As the robot travels through an unexplored area, the Kinect sensors visible-light video camera and infrared depth sensor scan the surroundings, building up a 3-D model of the walls of the room and the objects within it. Then, when the robot passes through the same area again, the system compares the features of the new image it has created including details such as the edges of walls, for example with all the previous images it has taken until it finds a match.
At the same time, the system constantly estimates the robots motion, using on-board sensors that measure the distance its wheels have rotated. By combining the visual information with this motion data, it can determine where within the building the robot is positioned. Combining the two sources of information allows the system to eliminate errors that might creep in if it relied on the robots on-board sensors alone, Fallon says.
Once the system is certain of its location, any new features that have appeared since the previous picture was taken can be incorporated into the map by combining the old and new images of the scene, Fallon says.
From MIT.
Scroll down for more stories in the same category. (Story submitted 2/16/2012)
Follow this kind of news @Technovelgy.| Email | RSS | Blog It | Stumble | del.icio.us | Digg | Reddit |
Would
you like to contribute a story tip?
It's easy:
Get the URL of the story, and the related sf author, and add
it here.
Comment/Join discussion ( 0 )
Related News Stories - (" Robotics ")
Satyress Centaur Robot Horror Reminds Everyone Of Something
'Fess was very dutiful' - Christopher Stasheff, 1969.
Pole-Dancing Stripperbot Robot
'Why, a clockwork dancer, or, better still, one that would go by electricity and never run down...' - Jerome K. Jerome, 1893.
VaMEx Biomimetic Mars Robot Inspired By Skink
'Across the ground something small and metallic came, flashing in the dull sunlight of midday.' - Philip K. Dick, 1953.
DIY Robotic Content Farming
'The chief wheeled to the master machine and pressed a button.' - Schachner and Zagat, 1931.
Technovelgy (that's tech-novel-gee!) is devoted to the creative science inventions and ideas of sf authors. Look for the Invention Category that interests you, the Glossary, the Invention Timeline, or see what's New.
Science Fiction
Timeline
1600-1899
1900-1939
1940's 1950's
1960's 1970's
1980's 1990's
2000's 2010's
Current News
Satyress Centaur Robot Horror Reminds Everyone Of Something
'Fess was very dutiful'
When Colds Threaten You Can't Do This - Or Can You?
'...a hemispherical force field enclosing his head.'
Beautiful Visualization of Dawn Spacecraft
'Then he became aware of a gentle pressure pushing him away from the ship.'
Biological War: A Scenario
'And now they wre busily transforming all their companions, and so on, and so on...'
Pole-Dancing Stripperbot Robot
'Why, a clockwork dancer, or, better still, one that would go by electricity and never run down...'
Collective Superintelligence Is At Hand!
'Maybe the individual intelligence of each Cubic pools into a group intelligence...'
Instant Journalists: Ordinary People With Cell Phones
'We'll show them whose planet this is!'
Health Kiosk Has No Human Doctor
'The electronic body analyzer had been developed...'
Meta's Horizon Studio's Unique Avatars From Text Prompts
'Looks like she has bought the Avatar Construction Set and put together her own...'
VaMEx Biomimetic Mars Robot Inspired By Skink
'Across the ground something small and metallic came, flashing in the dull sunlight of midday.'
NEO Brain Computer Interface (BCI)
'The remains of the lace took on the rough shape of a brain...'
Did Frank Herbert Predict Bistable Displays Like E-Ink?
'A broken circle with arrows pointing to a right-hand flow appeared in the chalf.'
Monolith One Giant Industrial Metal 3D-printer
'The object seemed melted together like wax nothing was distinguishable.'
'Mooncrete' Lunar Regolith Concrete (LRC)
'And here they began to build...'
China's 'Magpie Drone' Ornithopter
'Midges have many capabilities. To the untrained eye, they look like sparrows.'
MAI-Voice-2 Microsoft Text-To-Speech
'I made disks of my own voice to the number of five hundred very carefully chosen words.'