Science Fiction
Dictionary
A B C D E F G H I J K L M N O P Q R S T U V W X Y Z
 |
SuperBot Modular Robot Connects With NASA

SuperBot is a modular, multifunctional and reconfigurable robot, designed by Dr. Wei-Min
Shen and his team at the Information Sciences Institute at USC. You might say that SuperBot is
really a set of individual robots that work together to move around and solve problems. Dr. Shen
has been awarded more than $8 million in grants from NASA, DARPA and the NSF to continue his
research, including constructing a 100 module prototype to demonstrate how SuperBot might be used
in space exploration.
(SuperBot youtube video ([skip to 1 minute mark])
Dr. Shen points out the limits of the current set of robotic devices used for space exploration:
One of the most challenging issues for human-centered long-range space exploration is performing complex tasks in environments that are not human-friendly.... the traditional approach of building separate robots for separate tasks (such as the Canada Arm and surface rovers) may no longer be adequate for affordable space exploration as the required robotic tasks become diverse and the need to pack many functionalities into a single launch volume increases.
Dr. Shen proposes the SuperBot modules as a way to meet this goal. Each module is a "robot" in its own right, with microcontrollers, sensors, communications, power supply, three degrees of freedom and six connecting faces to dynamically connect with other modules. At launch, or when landing, SuperBot can pack itself into a minimum amount of space.
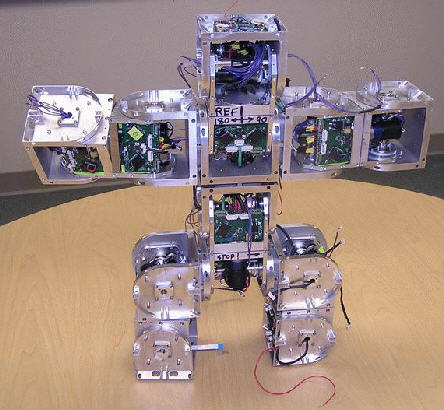
(SuperBot modular robot)
Upon arrival, SuperBot can unpack itself and take any of a wide variety of forms. For example, it might form several exploration rovers, one SuperBot capable of rolling down hill, another twisting "sidewinder-style" over level sand while another forms a SuperBot climbing robot to take on more challenging terrain.
(SuperBot forms 'sidewinder' snakebot)
SuperBot will help NASA to reduce costs and simplify operations by reusing robotic components from mission to mission. If the robotic modules are truly interchangeable and interoperable, the need for redundant parts on a given mission can be reduced, thus lowering payload mass and cost. Mission reliabilty and safety would be enhanced, since the modules themselves would know how to perform tasks, and would require less active direction from astronauts or ground crews.
Dr. Shen hopes to have his 100 module SuperBot operational and ready for testing in a desert environment by 2008.
The following articles provide more information about similar robots:
- Self-Replicating Modular Robots
Each ten centimeter cube is an autonomous unit with a microprocessor and a set of instructions on how to link themselves with other modules. - TETWalker: Shape-Shifting Robot Swarm
This bot is a prototype member of an autonomous nanotechnology swarm that can alter their shape to flow smoothly over rocky terrain.
Update 08-Feb-2017
Golden Age legend Jack Williamson wrote a great story titled The Infinite Enemy, published in Thrilling Wonder Stories in 1938, in which an alternate universe is found to contain a being comprised of metallic cubes.

End update.
Read more at the SuperBot press release and in this short SuperBot project abstract (pdf).
Scroll down for more stories in the same category. (Story submitted 2/25/2007)
Follow this kind of news @Technovelgy.| Email | RSS | Blog It | Stumble | del.icio.us | Digg | Reddit |
Would
you like to contribute a story tip?
It's easy:
Get the URL of the story, and the related sf author, and add
it here.
Comment/Join discussion ( 2 )
Related News Stories - (" Robotics ")
VaMEx Biomimetic Mars Robot Inspired By Skink
'Across the ground something small and metallic came, flashing in the dull sunlight of midday.' - Philip K. Dick, 1953.
DIY Robotic Content Farming
'The chief wheeled to the master machine and pressed a button.' - Schachner and Zagat, 1931.
Vero Robotic Dog With Vacuum Cleaner Feet
'Out of warrens in the wall, tiny robot mice darted.'
Boy Makes Biomimetic Turtle Robot
't came out into plain view. Darkington glimpsed a slim body and six short legs of articulated dull metal.'
Technovelgy (that's tech-novel-gee!) is devoted to the creative science inventions and ideas of sf authors. Look for the Invention Category that interests you, the Glossary, the Invention Timeline, or see what's New.
Science Fiction
Timeline
1600-1899
1900-1939
1940's 1950's
1960's 1970's
1980's 1990's
2000's 2010's
Current News
Health Kiosk Has No Human Doctor
'The electronic body analyzer had been developed...'
Meta's Horizon Studio's Unique Avatars From Text Prompts
'Looks like she has bought the Avatar Construction Set and put together her own...'
VaMEx Biomimetic Mars Robot Inspired By Skink
'Across the ground something small and metallic came, flashing in the dull sunlight of midday.'
NEO Brain Computer Interface (BCI)
'The remains of the lace took on the rough shape of a brain...'
Did Frank Herbert Predict Bistable Displays Like E-Ink?
'A broken circle with arrows pointing to a right-hand flow appeared in the chalf.'
Monolith One Giant Industrial Metal 3D-printer
'The object seemed melted together like wax nothing was distinguishable.'
'Mooncrete' Lunar Regolith Concrete (LRC)
'And here they began to build...'
China's 'Magpie Drone' Ornithopter
'Midges have many capabilities. To the untrained eye, they look like sparrows.'
MAI-Voice-2 Microsoft Text-To-Speech
'I made disks of my own voice to the number of five hundred very carefully chosen words.'
Tumblin' Tumbleweed Rovers To Eplore Mars
'His sensors out and working, and the whirring of the tape that sucked up sight and sound and shape and smell and form...'
Tentacled Robot Captures Space Debris
Preventing annoying space debris build-up.
Prufrock-MB2 Ready In Nashville
'It sounds to me as though you had invented a kind of metal earthworm.'
DIY Robotic Content Farming
'The chief wheeled to the master machine and pressed a button.'
Reflect Orbital Sunlight On Demand
'I don't have to tell you about the seven two-mile-diameter orbital mirrors that circulate around the satellite, making it habitable.'
The Amazing Lightfoot Electric Scooter With Solar Assist
'The steel tortoise gave MacKinnon a feeling of Crusoe- like independence.'
Fully Electric, Fully Automated Vegetable‑growing Agribots
'...then back to their work, though little enough it was on these automatic cultivators.'