Science Fiction
Dictionary
A B C D E F G H I J K L M N O P Q R S T U V W X Y Z
 |
Robots Need Realistic Skin!

Without realistic robot skin, robots will never have that humanlike personal touch, and will not have the degree of social acceptance that we all want robots to have.
Yet, one should not easily assume that humans will be comfortable with the idea of shaking an artificial hand made from a stiff material and can grip with a force that can reach up to 100 Newtons. In addition to the appropriate controls for a safe handshake grip and other forms of social touch, humanlike skin softness would be a reasonable requirement for the sociable robots envisioned to directly interact with humans in a social setting.
Human skin has properties that are not easy to replicate in synthetics. The authors of the paper identified three specific qualities that must be replicated to give that genuine human skin feeling:
"Touch is important in social interactions. Social touch are all those instances in which people touch each other, when shaking hands, when giving a pat in the back as a sign of congratulations and even in high-fives. Unless some form of alternative greetings are invented in the future, the typical social touches exchanged among humans may likely remain even with social robots...
Yes, yes - I know what you're thinking. What about good old silicone and polyurethane? The authors test these simplistic skin substitutes and find them wanting. Take a look at their skin materials testing machine.
The degree to which skin can be deformed by a force.
The degree to which the shape of skin conforms to an object that it touches or rests upon.
The difference between the way it deforms and then reforms - how force applied to skin is dissipated.
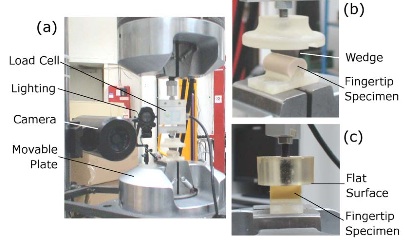
(From Sociable robots and prosthetics [pdf])
Skip down to the link set within this article for the creepiest robot skin of all. Guaranteed to pass all tests.
Robots like the ones depicted in the upcoming film Surrogates would just be crude mechanical contraptions without convincing skin.
Find out more about various attempts to create more realistic humanlike robot skin:
- Artificial Skin Swatches Mass-Produced
This is the creepiest possibility of all. Use actual artificially-produced human skin to cover robots. - Robot Skin Soft Like Yours
Countless tiny hexagonal indentations etched into the urethane epidermis provide it with a very realistic texture. - Sensitive Artificial Skin For Humans, Not Robots
Now kindly DARPA boffins are making sure that human beings will also have sensitive artificial skin. - Robots Get Pressure-Sensitive Skin
Organic field-effect transistors and rubber pressure sensors are used to create a practical artifical skin. - E-Skin For Robots Stretches Like Yours
This new technology is flexible like rubber but has conductivity that is 570 times higher.
From Towards Humanlike Social Touch for Sociable Robotics and Prosthetics: Comparisons on the Compliance, Conformance and Hysteresis of Synthetic and Human Fingertip Skins (pdf) by John-John Cabibihan, Stéphane Pattofatto, Moez Jomâa, Ahmed Benallal and Maria Chiara Carrozza. Via Technology Review.
Scroll down for more stories in the same category. (Story submitted 9/24/2009)
Follow this kind of news @Technovelgy.| Email | RSS | Blog It | Stumble | del.icio.us | Digg | Reddit |
Would
you like to contribute a story tip?
It's easy:
Get the URL of the story, and the related sf author, and add
it here.
Comment/Join discussion ( 3 )
Related News Stories - (" Robotics ")
VaMEx Biomimetic Mars Robot Inspired By Skink
'Across the ground something small and metallic came, flashing in the dull sunlight of midday.' - Philip K. Dick, 1953.
DIY Robotic Content Farming
'The chief wheeled to the master machine and pressed a button.' - Schachner and Zagat, 1931.
Vero Robotic Dog With Vacuum Cleaner Feet
'Out of warrens in the wall, tiny robot mice darted.'
Boy Makes Biomimetic Turtle Robot
't came out into plain view. Darkington glimpsed a slim body and six short legs of articulated dull metal.'
Technovelgy (that's tech-novel-gee!) is devoted to the creative science inventions and ideas of sf authors. Look for the Invention Category that interests you, the Glossary, the Invention Timeline, or see what's New.
Science Fiction
Timeline
1600-1899
1900-1939
1940's 1950's
1960's 1970's
1980's 1990's
2000's 2010's
Current News
Meta's Horizon Studio's Unique Avatars From Text Prompts
'Looks like she has bought the Avatar Construction Set and put together her own...'
VaMEx Biomimetic Mars Robot Inspired By Skink
'Across the ground something small and metallic came, flashing in the dull sunlight of midday.'
NEO Brain Computer Interface (BCI)
'The remains of the lace took on the rough shape of a brain...'
Did Frank Herbert Predict E-Ink Displays?
'A broken circle with arrows pointing to a right-hand flow appeared in the chalf.'
Monolith One Giant Industrial Metal 3D-printer
'The object seemed melted together like wax nothing was distinguishable.'
'Mooncrete' Lunar Regolith Concrete (LRC)
'And here they began to build...'
China's 'Magpie Drone' Ornithopter
'Midges have many capabilities. To the untrained eye, they look like sparrows.'
MAI-Voice-2 Microsoft Text-To-Speech
'I made disks of my own voice to the number of five hundred very carefully chosen words.'
Tumblin' Tumbleweed Rovers To Eplore Mars
'His sensors out and working, and the whirring of the tape that sucked up sight and sound and shape and smell and form...'
Tentacled Robot Captures Space Debris
Preventing annoying space debris build-up.
Prufrock-MB2 Ready In Nashville
'It sounds to me as though you had invented a kind of metal earthworm.'
DIY Robotic Content Farming
'The chief wheeled to the master machine and pressed a button.'
Reflect Orbital Sunlight On Demand
'I don't have to tell you about the seven two-mile-diameter orbital mirrors that circulate around the satellite, making it habitable.'
The Amazing Lightfoot Electric Scooter With Solar Assist
'The steel tortoise gave MacKinnon a feeling of Crusoe- like independence.'
Fully Electric, Fully Automated Vegetable‑growing Agribots
'...then back to their work, though little enough it was on these automatic cultivators.'
Vero Robotic Dog With Vacuum Cleaner Feet
'Out of warrens in the wall, tiny robot mice darted.'